Lý thuyết cơ bản chương dao động cơ, vật lí 12
Dao động cơ, dao động điều hòa
- Dao động cơ: là chuyển động của vật xung quanh vị trí cân bằng
- Dao động tuần hoàn: là dao động cơ có trạng thái chuyển động của vật lặp lại như cũ sau những khoảng thời gian bằng nhau.
- Dao động điều hòa: Là dao động tuần hoàn đơn giản nhất, có li độ (x) là hàm sin hoặc cosin
- Phương trình dao động điều hòa: \[x = A\cos(\omega t + \varphi)\]
- Chu kỳ dao động T (s): \[T = \dfrac{\text{thời gian}}{\text{số dao động}}\] = \[\dfrac{2\pi}{\omega}\] là khoảng thời gian mà trạng thái dao động của vật được lặp lại như cũ (khoảng thời gian vật chuyển động được một vòng)
- Tần số dao động f (Hz): \[f = \dfrac{\text{số dao động}}{\text{thời gian}}\] = \[\dfrac{1}{T}\] = \[\dfrac{\omega}{2\pi}\] là số dao động toàn phần thực hiện được trong 1 giây
- Phương trình vận tốc của dao động điều hòa:
v = x’ = –ωA.sin(ωt + φ) = ωAcos(ωt + φ + π/2)
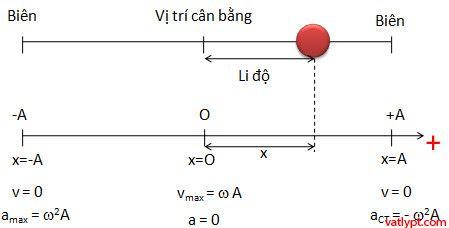
v$_{max}$ = Aω tại VTCB (x =0)
- Gia tốc trong dao động điều hòa
a = v’ = x” = –ω2A.cos(ωt + φ) = ω2A.sin(ωt + φ + π/2) = –ω2x
a$_{max}$ = ω2A tại biên âm (x = –A)
Giá trị cực tiểu a$_{CT}$ = –ω2A tại biên dương (x = A)
độ lớn cực tiểu: a$_{min}$ = 0 tại vị trí cân bằng (x = 0)
Trong đó:
- Li độ x: khoảng cách từ vị trí của vật đến vị trí cân bằng.
- Biên độ A = x$_{max}$
- ω: tần số góc (rad/s)
- ωt + φ: pha dao động
- φ: pha ban đầu của dao động
- vận tốc sớm pha hơn li độ góc π/2
- v > 0 vật chuyển động theo chiều dương
- v < 0 vật chuyển động theo chiều âm
- từ VTCB → biên: vật chuyển động chậm dần
- từ biên → VTCB: vật chuyển động nhanh dần
- gia tốc a sớm pha hơn vận tốc góc π/2
- gia tốc a –ω2x => a ngược pha với li độ x
- \[\vec{a}\] có chiều luôn hướng về vị trí cân bằng
- \[\vec{a}\] ↑↑\[\vec{v}\] khi vật chuyển động từ biên về VTCB
- \[\vec{a}\] ↑↓\[\vec{v}\] khi vật chuyển động từ VTCB ra biên
Liên hệ giữa dao động điều hòa và chuyển động tròn đều
Dao động điều hòa của con lắc lò xo
Dao động của con lắc lò xo nằm ngang
- li độ x = Acos(ωt + φ)
- vận tốc: v = –ωAsin(ωt + φ)
- gia tốc: a = –ω²Acos(ωt + φ)
- Tần số góc: $\omega=\sqrt{\dfrac{k}{m}}$
- Chu kỳ: $T=\dfrac{2\pi }{\omega}=2\pi \sqrt{\dfrac{m}{k}}$
- Tần số: $f=\dfrac{\omega}{2\pi }=\dfrac{1}{2\pi } \sqrt{\dfrac{k}{m}}$
Lực tác dụng vào con lắc lò xo nằm ngang
- Lực phục hồi: $F_{ph}$ = kx = mω2x
- Lực đàn hồi: $F_{đh}$ = k(x + Δℓ) = mω2(x + Δℓ)
- Lực đàn hồi, phục hồi cực đại: $F_{max}$ = kA = mω2A
- Lực đàn hồi, phục hồi cực tiểu: $F_{min}$ = 0
Trong đó:
- x: độ dời của vật nặng so với vị trí cân bằng (li độ) tính theo đơn vị mét
- Δℓ: là độ biến dạng của lò xo ở vị trí cân bằng
- con lắc lò xo nằm ngang Δℓ = 0 => F$_{ph}$ = F$_{đh}$
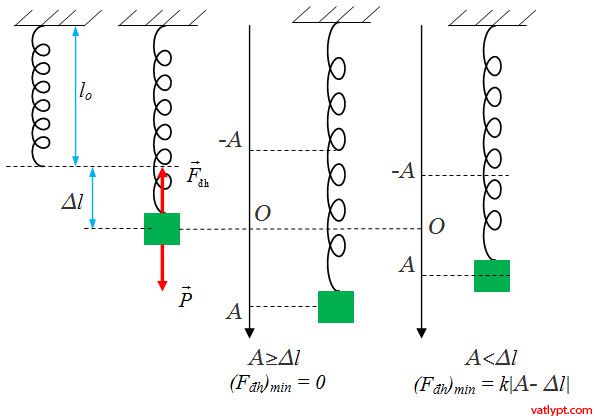
Dao động của con lắc lò xo treo thẳng đứng:
Chiều dài của lò xo treo thẳng đứng khi chưa biến dạng là ℓo; khi treo thêm vào vật khối lượng m, lò xo bị giãn ra một đoạn là Δℓ
- li độ x = Acos(ωt + φ)
- vận tốc: v = –ωAsin(ωt + φ)
- gia tốc: a = –ω²Acos(ωt + φ)
- Tần số góc: $\omega=\sqrt{\dfrac{k}{m}}$ = $\sqrt{\dfrac{g}{\Delta l}}$
- Chu kỳ: $T=\dfrac{2\pi }{\omega}=2\pi \sqrt{\dfrac{m}{k}}$=$2\pi \sqrt{\dfrac{\Delta l }{g}}$
- Tần số: $f=\dfrac{\omega}{2\pi }=\dfrac{1}{2\pi } \sqrt{\dfrac{k}{m}}$= $\dfrac{1}{2\pi }\sqrt{\dfrac{g}{\Delta l }}$
Lực tác dụng vào con lắc lò xo thẳng đứng
Lực phục hồi: $F_{ph}$ = kx = mω2x
- Lực phục hồi cực đại: $(F_{ph})$_{max}$ = kA
- Lực phục hồi cực tiểu: $(F_{ph})$_{min}$ = 0
Lực đàn hồi: $F_{đh}$ = k(x + Δℓ) = mω2(x + Δℓ)
- Lực đàn hồi cực đại: $(F_{đh})_{max}$ = k(A + Δℓ)
- Lực đàn hồi cực tiểu:
$(F_{đh})_{min}$ = 0 nếu (A ≥ Δℓ)
$(F_{đh})_{min}$ = k(Δℓ – A) nếu (A < Δℓ)
Dao động điều hòa của con lắc đơn
Phương trình dao động điều hòa của con lắc đơn
s = Socos(ωt + φ) (viết theo li độ dài)
α = αocos(ωt + φ) (viết theo li độ góc)
trong đó:
- So: biên độ (li độ cực đại) ứng với góc α$_{max}$=αo
- [tex]\omega =\sqrt{\dfrac{g}{l}}[/tex]: tần số góc của con lắc đơn (rad/s)
- Tần số: [tex]f=\dfrac{\omega}{2\pi} =\dfrac{1}{2\pi}\sqrt{\dfrac{g}{l}}[/tex]
- Chu kỳ: [tex]T=\dfrac{2\pi}{\omega} =2\pi \sqrt{\dfrac{l}{g}}[/tex]
3/ Năng lượng dao động của con lắc đơn
a/ Động năng: $W_{đ }$= 0,5mv2
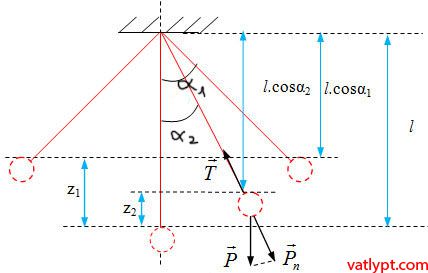
b/ Thế năng: Chọn gốc thế năng tại vị trí cân bằng (α=0o),
Thế năng của con lắc đơn tại vị trí góc α bất kỳ
$W_{t}$=mgz2=mg(l – l.cosα)=mgl(1-cosα)=>$(W_{t})_{max}$ = $mgz_{1 }$= mgl(1-cosαo)
c/ Cơ năng: $W=W_{đ} + W_{t}$ = mgl(1-cosαo) = 0,5mv2 + mgl(1-cosα)
Vận tốc: [tex]v=\sqrt{2gl(cos\alpha -cos\alpha _{o})}[/tex] → [tex]v_{max}=\sqrt{2gl(1 -cos\alpha _{o})}[/tex]
4/ Lực căng của dây
Chuyển động của vật m là chuyển động tròn đều trên bán kính quỹ đạo có bán kính l, hợp giữa lực căng T của dây treo và thành phần P$_{n }$ = mgcosα của trọng lực đóng vai trò lực hướng tâm => áp dụng định luật II Newton ta có
T – mgcosα = [tex]m.\dfrac{v^{2}}{l}[/tex]=>T=mgcosα + 2mg(cosα – cosαo) => $T_{max }$= mg(3-2cosαo)
Lý thuyết về các loại dao động
- Dao động tắt dần: có biên độ, năng lượng giảm dần theo thời gian
- Dao động duy trì: là dao động tắt dần có chu kỳ được giữ không đổi bằng cách cung cấp năng lượng cho dao động đúng bằng phần năng lượng bị mất đi do lực ma sát của môi trường.
3/ Dao động cưỡng bức, cộng hưởng cơ:
Dao động cưỡng bức: là dao động chịu tác dụng của ngoại lực cưỡng bức tuần hoàn F=Fo.cos(ωt + φ). Trong đó ω=2πf với f là tần số của ngoại lực cưỡng bức.
Các đặc điểm của dao động cưỡng bức:
- Biên độ của dao động cưỡng bức phụ thuộc vào:
+/ |f – fo| với fo là tần số riêng của dao động. |f – fo| càng nhỏ thì biên độ dao động cưỡng bức càng lớn.
+/ Biên độ Fo của ngoại lực cưỡng bức
- Biên độ dao động cững bức không phụ thuộc vào pha ban đầu của ngoại lực cưỡng bức.
Hiện tượng cộng hưởng cơ: là hiện biên độ dao động của dao động cưỡng bức đạt giá trị cực đại xảy ra khi tần số của ngoại lực cưỡng bức bằng tần số riêng của hệ dao động (f=fo).
Tổng hợp dao động điều hòa theo phương pháp Frenen:
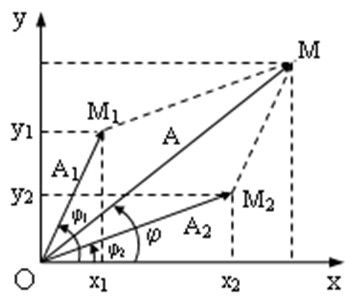
dao động thứ nhất: x$_{1 }$= A1cos(ωt + φ1)
dao động thứ hai: x$_{2 }$= A2cos(ωt + φ2)
dao động tổng hợp: x = x1 + x$_{2 }$= Acos(ωt + φ)
|A1 – A2| ≤ A ≤ A1 + A2
Cách xác định biên độ, pha ban đầu của dao động tổng hợp theo phương pháp Frenen
\[\vec{A}\] = \[\vec{A_1}\] + \[\vec{A_2}\] =>
A$^{2 }$= A12 + A22 + 2A1A2 cos (φ2 – φ1)
\[tan\varphi =\dfrac{A_{1}sin\varphi _{1}+A_{2}sin\varphi _{2}}{A_{1}cos\varphi _{1}+A_{2}cos\varphi _{2}}\]
Trong đó:
- Δφ = φ2 – φ1: gọi là độ lệch pha của hai dao động
- Δφ = 2n π (chẵn lần π): hai dao động cùng pha => A=A1 + A2
- Δφ=(2n+1)π (lẻ lần π): hai dao động ngược pha => A=| A1 – A2 |
- Δφ = (2n+1)\[\dfrac{\pi }{2}\] (lẻ lần π/2): hai dao động vuông pha: \[A=\sqrt{A_{1}^{2}+A_{2}^{2}}\]
Tổng hợp dao động điều hòa bằng phương pháp cộng số phức (casio)
x$_{1 }$= A1cos(ωt + φ1) => x$_{1 }$= A$_{1 }$∠φ1
x$_{2 }$= A2cos(ωt + φ2) => x2 = A$_{2 }$∠φ2
x = x1 + x2 = Acos(ωt + φ) => x = A1∠φ$_{1 }$+ A2∠φ2 = A∠φ