BÀI TẬP CHIỀU DÀI CON LẮC LÒ XO
1. Dạng 1: Tính chiều dài của lò xo trong quá trình vật dao động
Gọi chiều dài tự nhiên của lò xo là l0.
– Khi con lắc lò xo nằm ngang:
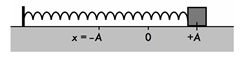
+ Lúc vật ở VTCB, lò xo không bị biến dạng,
+ Chiều dài cực đại của lò xo: \({l_{{\rm{max}}}} = {l_0} + A\)
+ Chiều dài cực tiểu của lò xo: \({l_{{\rm{min}}}} = {l_0} – A\)
+ Chiều dài ở li độ x: \(l = {l_0} + x\)
– Khi con lắc lò xo bố trí thẳng đứng hoặc nằm nghiêng một góc αvà treo ở dưới.
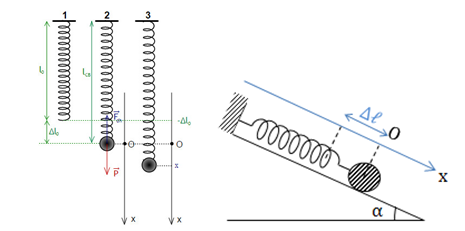
+ Độ biến dạng của lò xo khi vật ở VTCB:
- Con lắc lò xo treo thẳng đứng: \(\Delta {l_0} = \dfrac{{mg}}{k}\)
- Con lắc lò xo nằm nghiêng góc α: \(\Delta {l_0} = \dfrac{{mg\sin \alpha }}{k}\)
+ Chiều dài lò xo khi vật ở VTCB: \({l_{vtcb}} = {l_0} + \Delta l\)
+ Chiều dài ở li độ x: \(l = {l_0} + \Delta {l_0} + x\)
+ Chiều dài cực đại của lò xo: \({l_{{\rm{max}}}} = {l_0} + \Delta {l_0} + A\)
+ Chiều dài cực tiểu của lò xo: \({l_{{\rm{min}}}} = {l_0} + \Delta {l_0} – A\)
2. Dạng 2: Lực kéo về
\(F{\rm{ }} = – {\rm{ }}kx{\rm{ }} = – {\rm{ }}m{\omega ^2}x\)
Đặc điểm:
* Là lực gây dao động cho vật.
* Luôn hướng về VTCB
* Biến thiên điều hoà cùng tần số với li độ
3. Dạng 3: Lực đàn hồi – Lực hồi phục cực đại, cực tiểu.
Có độ lớn \({F_{dh}} = {\rm{ }}k{x^*}\) (x* là độ biến dạng của lò xo)
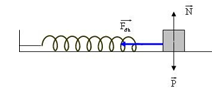
– Với con lắc lò xo nằm ngang thì lực kéo về và lực đàn hồi là một (vì tại VTCB lò xo không biến dạng)
– Với con lắc lò xo thẳng đứng hoặc đặt trên mặt phẳng nghiêng:
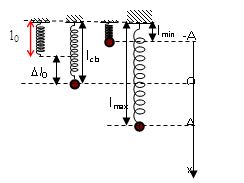
+ Độ lớn lực đàn hồi có biểu thức:
- \({F_{dh}} = {\rm{ }}k|\Delta {l_0} + {\rm{ }}x|\) với chiều dương hướng xuống
- \({F_{dh}} = k\left| {\Delta {l_0} – {\rm{ }}x} \right|\) với chiều dương hướng lên
+ Lực đàn hồi cực đại (lực kéo): \({F_{{\rm{max}}}} = k\left( {\Delta {l_0} + A} \right) = {F_{Km{\rm{ax}}}}\) (lúc vật ở vị trí thấp nhất)
+ Lực đàn hồi cực tiểu:
- Nếu\(A{\rm{ }} < \Delta {l_0} \to {F_{Min}} = {\rm{ }}k(\Delta {l_0} – {\rm{ }}A) = {F_{KMin}}\)
- Nếu \(A{\rm{ }} \ge \Delta {l_0} \to {F_{Min}} = 0\) (lúc vật đi qua vị trí lò xo không biến dạng)
+ Lực đẩy (lực nén) đàn hồi cực đại: ${F_{Nm{\rm{ax}}}} = k\left( {A – \Delta {l_0}} \right)$ (lúc vật ở vị trí cao nhất)
+ Lực đàn hồi, lực hồi phục:
- Lực đàn hồi:\(\begin{array}{l}{F_{dh}} = k(\Delta l + x){\rm{ }}\\ \Rightarrow \left\{ {\begin{array}{*{20}{c}}{{F_{d{h_{{\rm{Max}}}}}} = k(\Delta l + A){\rm{ }}}\\{{F_{d{h_{\min }}}} = k(\Delta l – A){\rm{ khi }}\Delta l > A}\\{{F_{d{h_{\min }}}} = 0{\rm{ khi}}\Delta {\rm{l}} \le {\rm{A }}}\end{array}} \right.{\rm{ }}\end{array}\)
- Lực hồi phục: \({F_{hp}} = kx{\rm{ }} \Rightarrow \left\{ {\begin{array}{*{20}{c}}{{F_{h{p_{{\rm{Max}}}}}} = kA}\\{{F_{h{p_{\min }}}} = 0{\rm{ }}}\end{array}} \right.{\rm{ }}\)hay\({F_{hp}} = ma{\rm{ }} \Rightarrow \left\{ {\begin{array}{*{20}{c}}{{F_{h{p_{{\rm{Max}}}}}} = m{\omega ^2}A}\\{{F_{h{p_{\min }}}} = 0{\rm{ }}}\end{array}} \right.\)
+ Lực hồi phục luôn hướng vào vị trí cân bằng.
Khi hệ dao động theo phương nằm ngang thì lực đàn hồi và lực hồi phục là như nhau ${F_{dh}} = {F_{hp}}$