Khảo sát dao động điều hòa của con lắc lò xo treo thẳng đứng vật lí 11 DAO ĐỘNG chương trình 2018
Dao động của con con lắc lò xo treo thẳng đứng
Bỏ qua mọi ma sát và lực cản, dao động của con lắc lò xo treo thẳng đứng là dao động điều hòa Chọn gốc tọa độ O tại vị trí cân bằng của con lắc lò xo như hình vẽ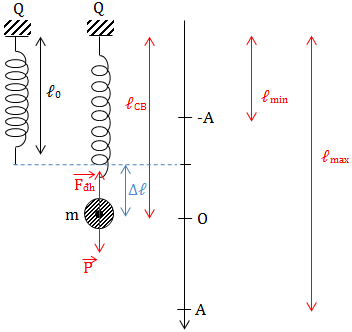
Khi treo quả nặng khối lượng m vào lò xo, dưới tác dụng của trọng lực lò xo dãn một đoạn là \(\Delta {l_0}\)
Vì lò xo nằm cân bằng
→ $\vec{P} + \vec{F_{\text{đh}}}=\vec{0}$ → $F_{\text{đh}} = P$ → $k.\Delta {l_0} = mg$ →
- $\Delta {l_0} = \dfrac{{mg}}{k}$
- $\dfrac{m}{k} = \dfrac{\Delta {l_0}}{g}$
Phương trình li độ, vận tốc, gia tốc
- Li độ: x = A.cos(ωt + φ)
- Vận tốc: $v = x’ = – \omega A\sin (\omega t + \varphi )$
- Gia tốc: $a = v’ = – {\omega ^2}A\cos (\omega t + \varphi )$
Tần số góc, chu kỳ, tần số
- Tần số góc $\omega = \sqrt{\dfrac{k}{m}} = \sqrt{\dfrac{g}{\Delta {\ell_0}}}$
- Chu kỳ $T = \dfrac{2\pi}{\omega} = 2\pi\sqrt{\dfrac{\Delta {\ell_0}}{g}}$ (Từ khóa: Tình Là Gì – TLG)
- Tần số: $f = \dfrac{1}{T} = \dfrac{\omega}{2\pi} = \dfrac{1}{2\pi}\sqrt{\dfrac{g}{\Delta {l_0}}}$
Công thức tính chiều dài
- Chiều dài tự nhiên của con lắc lò xo khi chưa biến dạng: $\ell_o$
- Độ biến dạng ban đầu của con lắc lò xo treo thẳng đứng: $\Delta \ell_o = \dfrac{mg}{k}$
- Chiều dài của con lắc lò xo ở vị trí cân bằng: $\ell_{cb} = \ell_o + \Delta \ell_o$
- Chiều dài cực đại của lò xo: \({\ell_{{\rm{max}}}} = \ell_{cb} + A\)
- Chiều dài cực tiểu của lò xo: \({\ell_{{\rm{min}}}} = \ell_{cb} – A\)
- Chiều dài ở li độ x: \(\ell = \ell_{cb} + x\)
Công thức tính năng lượng
- Động năng: \(\begin{array}{l}{W_d} = \dfrac{1}{2}m{v^2} = \dfrac{1}{2}m{\omega ^2}{A^2}{\sin ^2}(\omega t + \varphi )\\ = W – {W_t} = \dfrac{1}{2}k{A^2} – \dfrac{1}{2}k{x^2}\end{array}\)
- Thế năng: \(\begin{array}{l}{W_t} = \dfrac{1}{2}k{x^2} = \dfrac{1}{2}k{A^2}{\rm{co}}{{\rm{s}}^2}(\omega t + \varphi )\\ = W – {W_d} = \dfrac{1}{2}k{A^2} – \dfrac{1}{2}m{v^2}\end{array}\)
- Cơ năng: \(W = {W_d} + {W_t} = \dfrac{1}{2}m{v^2} + \dfrac{1}{2}k{x^2} = \dfrac{1}{2}m{\omega ^2}{A^2} = \dfrac{1}{2}k{A^2}\)
Công thức tính lực phục hồi
- Tổng quát: F = ma = m(-ω2x) = -mω2x = -kx
- Lực phục hồi cực đại: $F_{max} = k.A$
- Lực phục hồi cực tiểu: $F_{min} = 0$
Công thức tính lực đàn hồi
- Tổng quát: $F_{\text{đh}} = k.\Delta l$
- Lực đàn hồi cực đại: $F_{\text{đh}max} = k.(A + \Delta \ell_o)$
- Lực đàn hồi cực tiểu: $F_{\text{đh}min} = k.|A – \Delta \ell_o|$ (nếu $A < \Delta \ell_o$)
- Lực đàn hồi cực tiểu: $F_{\text{đh}min} = 0 $ (nếu $A ≥ \Delta \ell_o$)